How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum

By A Mystery Man Writer
Hi, I need to store multiple positions/poses of the robot to access them later in the program. The number of positions depends on the user input - the query works perfectly. I thought I could just make a loop and fill each pose into an array but it does not work. I know how to store a pose in a single variable but in my application the user decides how many poses he needs to store. Can anyone shed some light here? Thanks and best regards Stephan PS: oh and where can I change my username to

Applied Sciences, Free Full-Text

Uncategorised Archives - Climate Outreach

Amazing takeaway from #A3Forum2024! Robotics creates jobs in manufacturing!, Jake Hall posted on the topic

Making the Case: The Dangers of Killer Robots and the Need for a Preemptive Ban

Cylons - Wikipedia
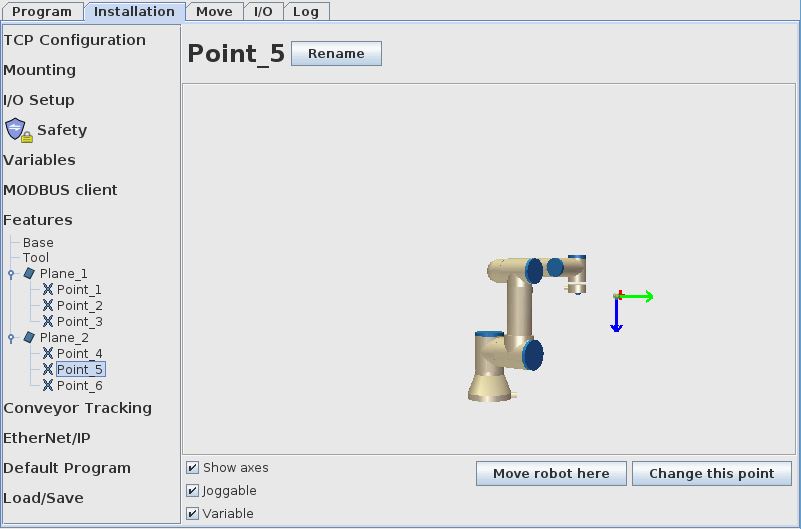
Planes and position variables 2 – UR Forum-Help-Q&A
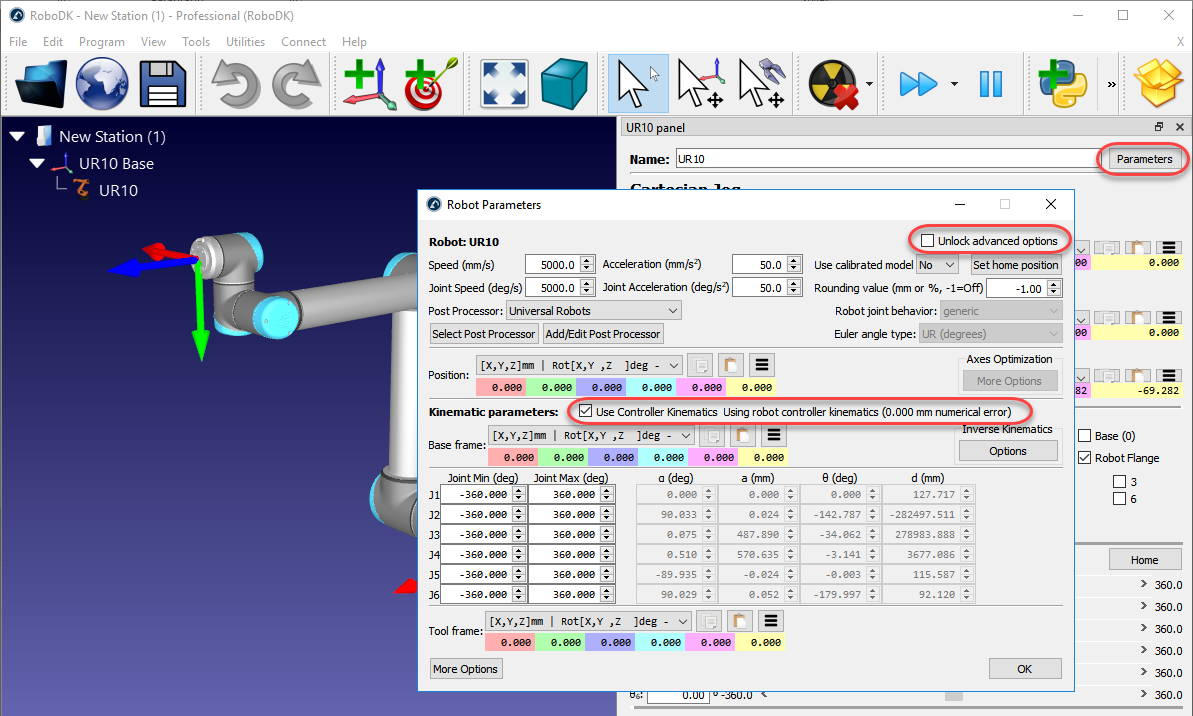
Universal Robots - RoboDK Documentation

Industrial Robots, Fundamentals of Industrial Robots
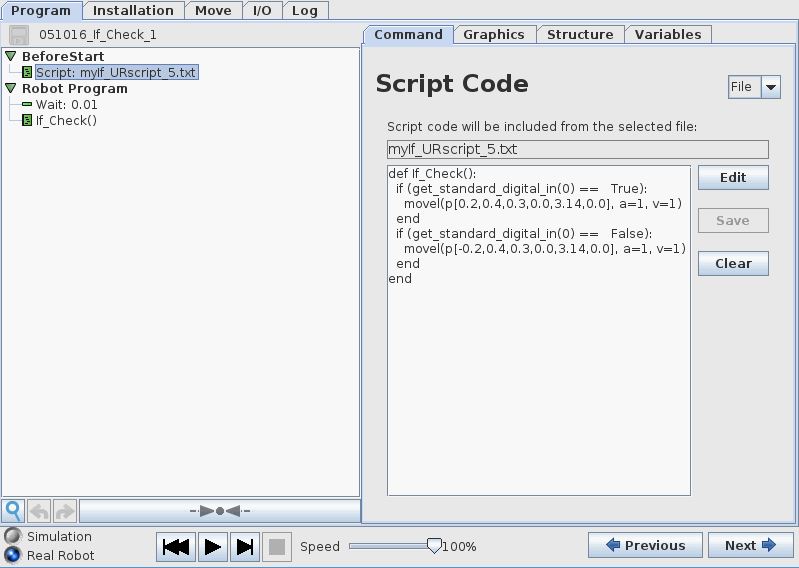
UR Programming Functions: – UR Forum-Help-Q&A

Can't save program in VirtualBox - Technical Questions - Universal Robots Forum
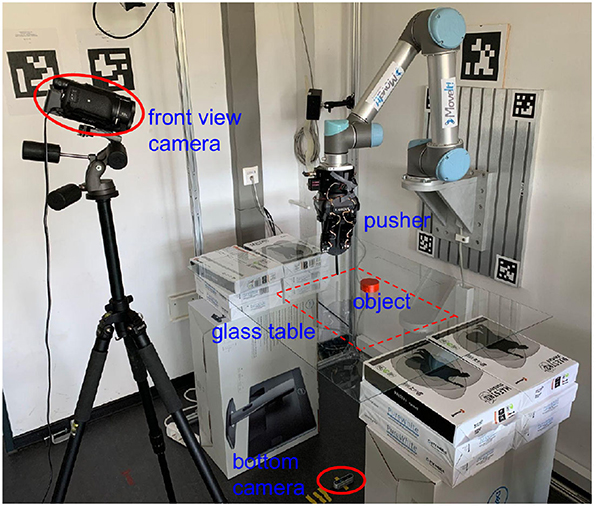
Frontiers Reinforcement Learning With Vision-Proprioception Model for Robot Planar Pushing

OSARO debuts AI-powered robotics for mixed-case depalletization - Mobile Robot Guide
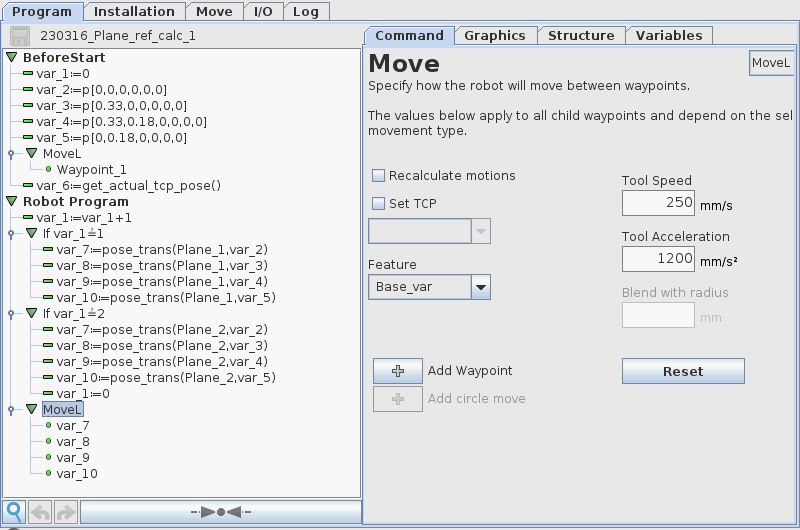
Planes and position variables 2 – UR Forum-Help-Q&A
Animation Magazine Sep/Oct Cartoon Forum Issue by Animation Magazine, Inc. - Issuu
- Skims Dupes Two Piece Outfits for Women Casual Stretchy Ribbed Crop Top Drawstring Ruched Shorts Set Workout Tracksuits, Brown, Medium : : Clothing, Shoes & Accessories

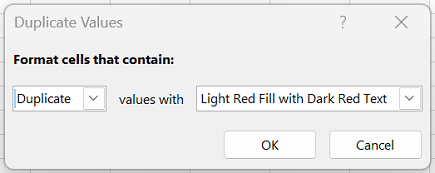
- Find and remove duplicates - Microsoft Support
- Same, Skip and Step Combo (Level 2) - Cascade Method
- SKIP HOP FORGET-ME-NOT 3 PIECE BACKPACK SET, GLASSES, ONE SIZE Plush Bag - Plush Bag

- Multiple ministries, similar schemes Budget 2017: Impact - Business Standard
)
- Korean Women Cool Drawstring Elastic Waist Jogger Harem Pants Casual Leggings

- Other Stories Embroidered Lace Soft Bra

- Life Brand Elastic Knee Brace With Stabilizers, Small-Medium, 1 Pack - 1 ea

- OAVQHLG3B Summer Denim Shirt Dresses for Womens Short Sleeve Loose

- Rayon XXXL Charcoal Grey Capris With Piping Women Gym Wear Low Rise, 200 Gsm at Rs 1599/piece in Bengaluru
